کنترل PID یکی از رایجترین روشهای کنترل خودکار در سیستمهای صنعتی و مهندسی است که به دلیل سادگی، کارایی بالا، و انعطافپذیری در بسیاری از فرآیندها استفاده میشود. این مقاله به بررسی مفهوم کنترل PID، ساختار آن، و انواع مختلف این کنترلر میپردازد.
عملکرد PID:
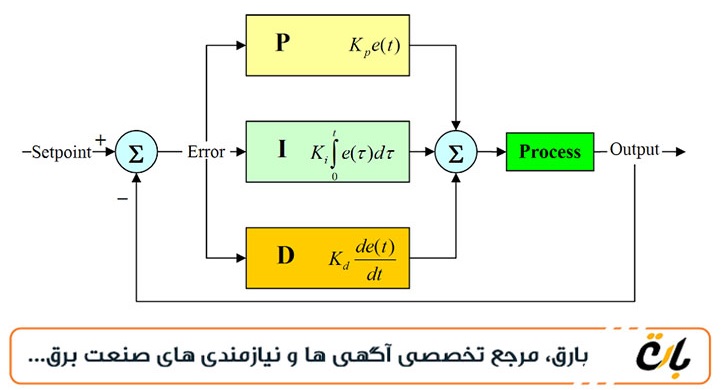
کنترلر PID از ترکیب سه بخش تشکیل شده است:
کنترل تناسبی (P):
بخش تناسبی مستقیماً با مقدار خطا متناسب است. این بخش به تنظیم خروجی کنترلر کمک میکند و اثر اصلی را در پاسخ سریع سیستم ایفا میکند.
![]()
که ضریب تناسبی و مقدار خطا است.
کنترل انتگرالی (I):
بخش انتگرالی با جمع خطاها در طول زمان سروکار دارد. این بخش به حذف خطای پایدار (Steady-State Error) کمک میکند.
![]()
کنترل مشتقی (D):
بخش مشتقی نرخ تغییر خطا را محاسبه میکند. این بخش به کاهش نوسانات و بهبود پایداری سیستم کمک میکند.

ترکیب PID:
کنترلر PID خروجی خود را از ترکیب این سه بخش بهصورت زیر تولید میکند:
![]()
با تنظیم ضرایب Kp، Ki، Kd میتوان رفتار سیستم را بر اساس نیازهای خاص کنترل تنظیم کرد.
انواع کنترلر PID:
کنترل P (تناسبی):
فقط از بخش تناسبی استفاده میکند.
سادهترین نوع PID.
خطای پایدار را بهطور کامل حذف نمیکند و ممکن است نوسانات داشته باشد.
کنترل PI (تناسبی-انتگرالی):
ترکیب تناسبی و انتگرالی.
خطای پایدار را حذف میکند، اما ممکن است باعث نوسانات در سیستم شود.
کنترل PD (تناسبی-مشتقی):
ترکیب تناسبی و مشتقی.
مناسب برای کاهش نوسانات و افزایش پایداری، اما خطای پایدار را از بین نمیبرد.
کنترل کامل PID:
شامل هر سه بخش است (P، I و D).
بالاترین دقت و عملکرد را دارد.
مناسب برای سیستمهای پیچیده و حساس.
کاربردهای کنترل PID:
کنترل دما: در سیستمهای گرمایشی و سرمایشی.
کنترل سرعت موتور: تنظیم سرعت موتورهای الکتریکی در صنایع.
کنترل موقعیت: در روباتیک و سامانههای کنترل حرکت.
کنترل فشار و جریان: در صنایع نفت و گاز.
سیستمهای اتوماسیون صنعتی: مانند PLCها و DCSها.
چالشها و تنظیم PID:
یکی از مهمترین مسائل در استفاده از PID، تنظیم ضرایب Kp، Ki، Kd است که به آن تیونینگ PID گفته میشود. این کار میتواند به صورت دستی یا با استفاده از روشهای الگوریتمی مانند Ziegler-Nichols انجام شود.
روشهای تنظیم PID:
1. روش دستی (روش آزمایش و خطا):
در این روش، ضرایب بهصورت تدریجی و تجربی تنظیم میشوند:
ابتدا Ki و را صفر قرار دهید.
مقدار را بهآرامی افزایش دهید تا سیستم به نقطه تنظیم نزدیک شود، اما بدون نوسان یا بیشجهش زیاد.
Ki را افزایش دهید تا خطای پایدار حذف شود. دقت کنید که مقدار بیش از حد باعث نوسانات میشود
Kd را بهآرامی افزایش دهید تا سرعت واکنش سیستم بهبود یابد و نوسانات کاهش پیدا کند
2. روش Ziegler-Nichols:
این روش یکی از محبوبترین تکنیکهای تیونینگ است:
و را صفر کنید.
مقدار را افزایش دهید تا سیستم به حد نوسان پایدار برسد (بدون خاموش شدن یا افزایش دامنه نوسان).
فرکانس نوسان (T) را اندازهگیری کنید.
با استفاده از ضرایب زیر، ، ، و را تنظیم کنید:

Kc: مقدار Kp در آستانه نوسان پایدار.
T: دوره تناوب نوسانات پایدار.
نتیجهگیری:
کنترلر PID یکی از اساسیترین و پرکاربردترین ابزارهای کنترل صنعتی است که با تنظیم ضرایب مناسب، میتواند در انواع سیستمها عملکردی بسیار دقیق و قابلاعتماد داشته باشد. انتخاب نوع مناسب کنترلر (P، PI، PD، PID) بستگی به نیاز و پیچیدگی سیستم دارد.

ترجمه و جمع آوری:
واحد تحقیق و توسعه بارق، Baregh
بارق، مرجع آگهی ها و نیازمندی های صنعت برق